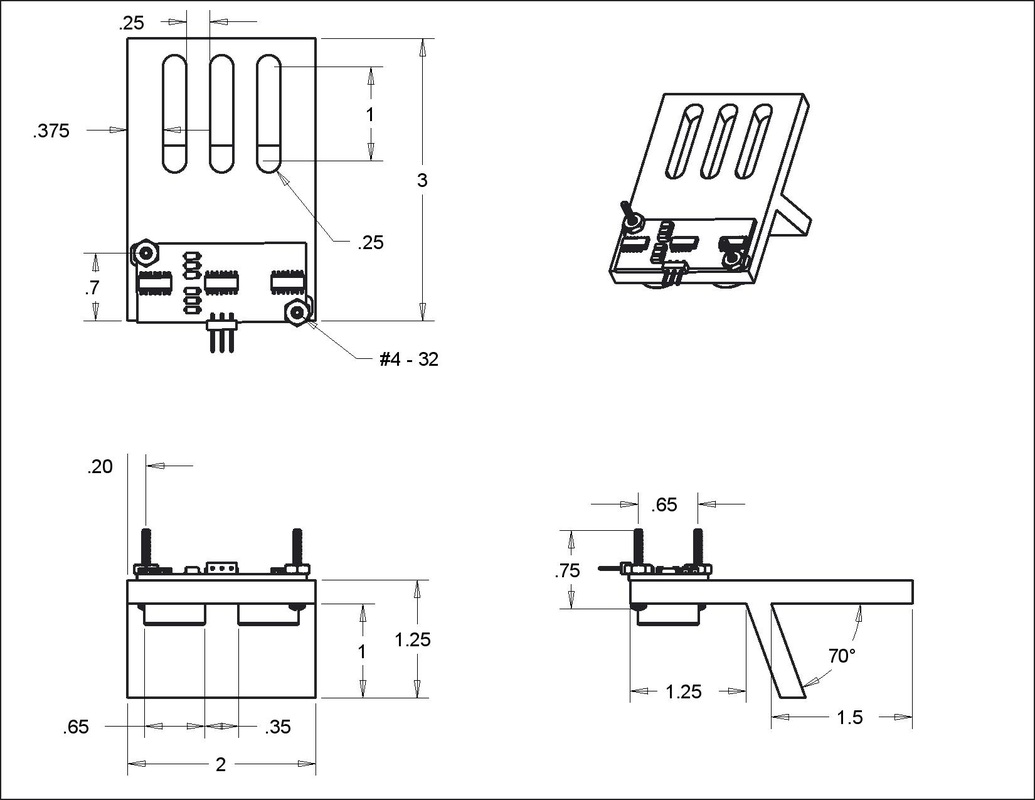
Ultrasonic (also parallax ping sensor) Mount . Mounted in the front (hence the 70 degree angle) it detects the topography of the area in front of the robot. It sends a high pitched sound using one head and receives the sound in the other. Using a #4 - 32 screw for the ultrasonic sensor to be kept in place facing towards the ground. The slots are their for adjust ability. Uses PLA plastic with a 15% infill (not solid)
3D Printer Makerbot 2.0 printing out the piece
