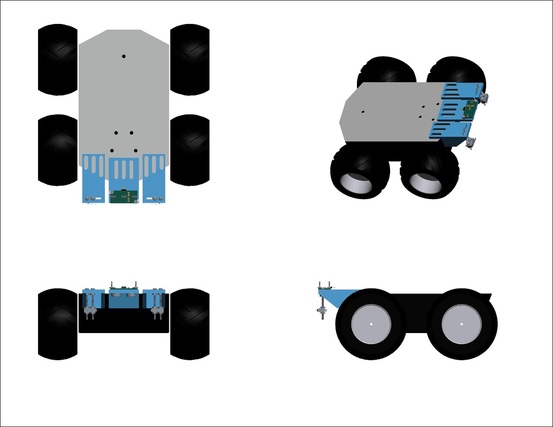
Our final version of the robot. With the chassis from the LAZARUS projects as well as 3 sensors in front (from left to right)(Limit switch, Ultrasonic, Limit Switch) The mounts use the angle in front to mount. The limit switches are mechanical stops for physically stopping the robot, and digital stops for the robot. The ultrasonic is meant to measure topography in front of the robot.
