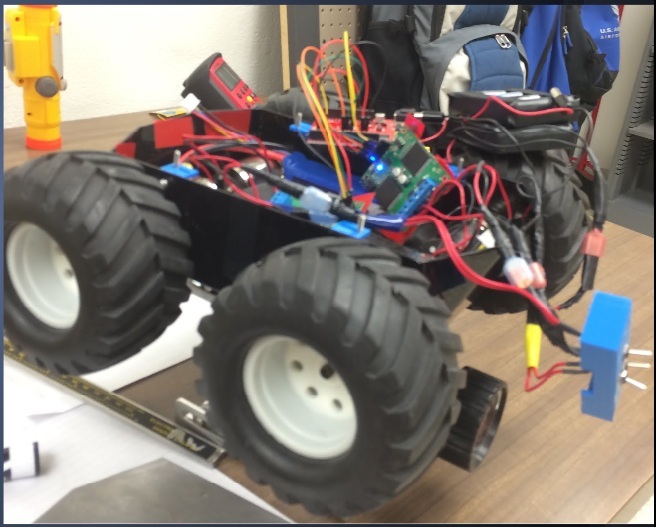
From the LAZARUS project we got a Mouse Bot that is used for all robotics. We started with a base then we added all the mounts with screws on the top
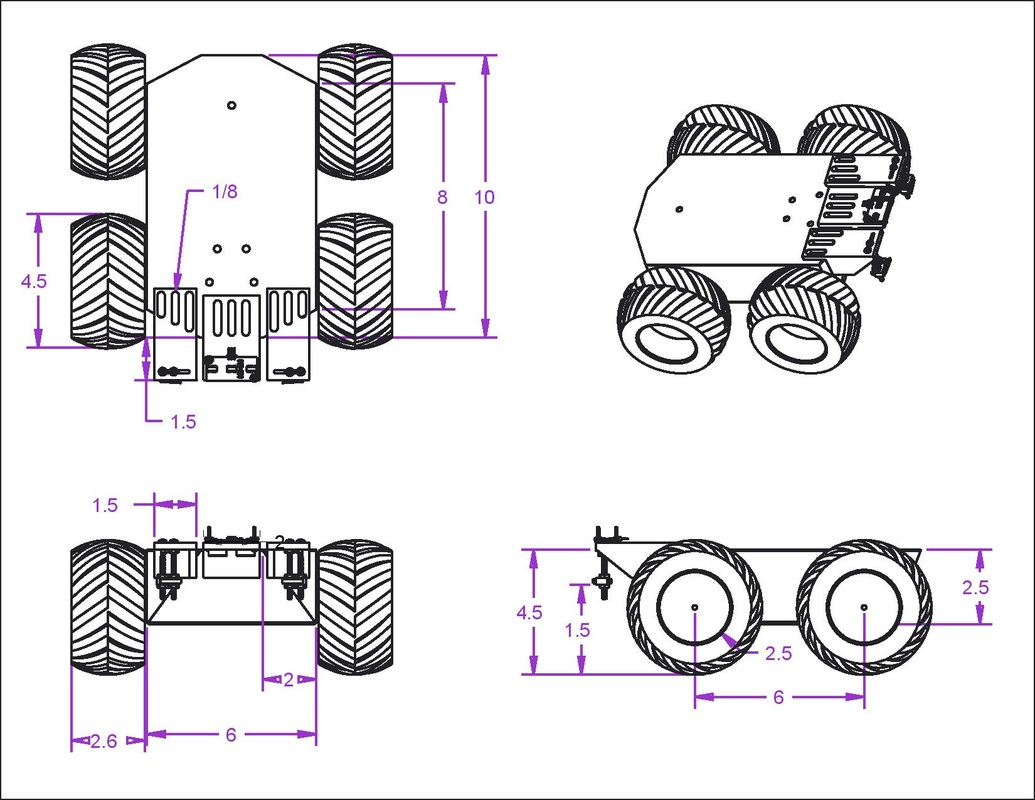
The chassis is used because of the need for movement and control for the robot as well as being the base on which the sensors are to be mounted. With it threaded wheels and motor controller, the robot can maneuver around a variety of rough terrain. The front and back of the robot are angled in for mounts so that the mounts can have an advantage of using a triangle. The obtuse angle present is strong enough for the mounts so that the mounts cannot break off. The inside of the robot also provide a copious amount of space for electronics to fit in.